
TF Mini LiDAR(ToF) Laser Range Sensor(sen0259)




INTRODUCTION
The TF Mini LiDAR is an unidirectional laser range finder based upon time-of-flight (ToF) technology. It consists of special optical and electronic devices, which integrates adaptive algorithm for indoor and outdoor application environment. It has tiny body and high performance in distance measurement.
The laser sensor can be used as a distance-measuring tool to detect the distance from it to obstacles. It can also be used as an eye of a robot; it provides distance information for robotic safe avoidance and route selection. It supports for system automation in a variety of machine control scenarios. Because of its small size, light weight and low power consumption, it is also suitable for altitude hold quad-copters and terrain following.

Figure 1: TF Mini Optical Stimulation Light Path
TF Mini's maximum detection distance is 12 meters. TF Mini also supports 100Hz sampling resolution, within 6 meters, its accuracy is within 4cm, 6~12 meters, accuracy within 6 cm. FOV of 2.3 degree. Its anti-interference is strong, and can work in outdoor light; the overall weight is 4.7g.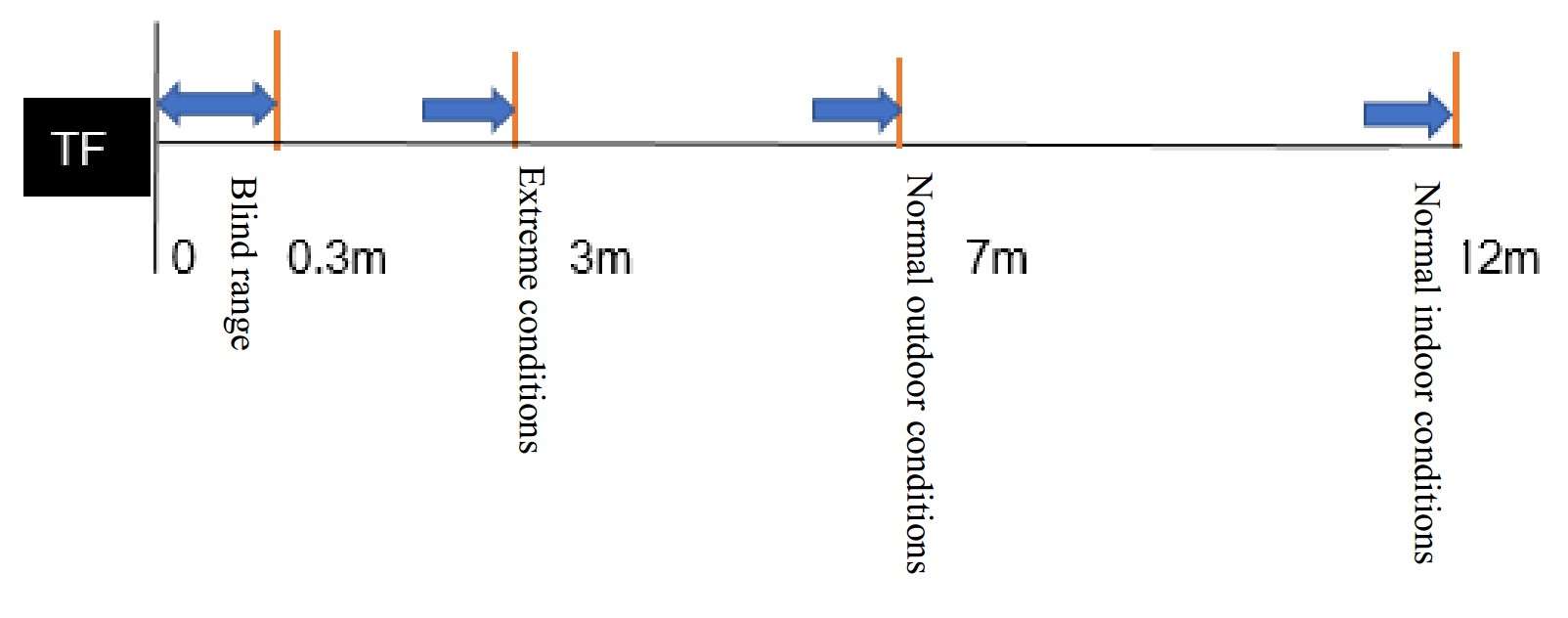
Measurement range schematic diagram
TF Mini LiDAR adopts UART (TTL) communication interface, can supplied by standard 5V, and its average power consumption is 0.6w. It can be compatible with a variety of Arduino controllers. With the DFRobot Gravity IO Expansion Shield, Arduino can be plugged in directly without additional wiring. 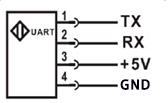
It can be easily integrated into the system when used with the Arduino library developed by DFRobot.
Arduino TF mini Connection Diagram
NOTE:
FEATURES
APPLICATIONS
SPECIFICATION
DOCUMENTS
SHIPPING LIST
Customers also bought












